
车载摄像头产业分析报告:车载摄像头基础解析(一)
来源:爱游戏官网登录入口唯一 发布时间:2024-07-17 02:24:26 浏览数:181 次
车载摄像头被誉为是车辆感知物理世界的“眼睛”,是实现无人驾驶的核心感知传感器。随着360环视、车道保持辅助(LKA)、行人AEB、驾驶员监控系统(DMS)等功能渗透率的提升,单车摄像头平均搭载数量逐渐增加,车载摄像头的市场规模也慢慢变得大。根据相关统计多个方面数据显示,2022年中国乘用车市场单车摄像头平均搭载数量为3.0颗;2023年第一季度,摄像头平均搭载数量为3.3颗,同比增加0.5颗。

据CINNO Research预测,2023年,国内乘用车市场摄像头搭载量将逐步提升至7200万颗,到2025年,这一数字将超过1亿颗,2023~2025年的年复合增长率为17%。
高分辨率、去ISP化、高动态范围以及高感光灵敏度等将成为车载摄像头技术发展的主线。车载摄像头的技术迭代又逐步加强了其在感知传感器中的核心地位,产品价值和应用场景也将被进一步扩大。
在此背景下,焉知汽车推出《车载摄像头产业分析报告》,从车载摄像头基础解析、车载摄像头产业链分析、车载摄像头应用趋势、车载摄像头行业竞争格局、国内车载摄像头重点企业及产品布局等方面入手,综合分析车载摄像头的产业链发展现状及未来应用趋势,为行业研究和企业未来的发展提供参考。
由于时间仓促,报告中难免会有疏漏和不足之处,敬请各位专家、同行、读者批评指正。
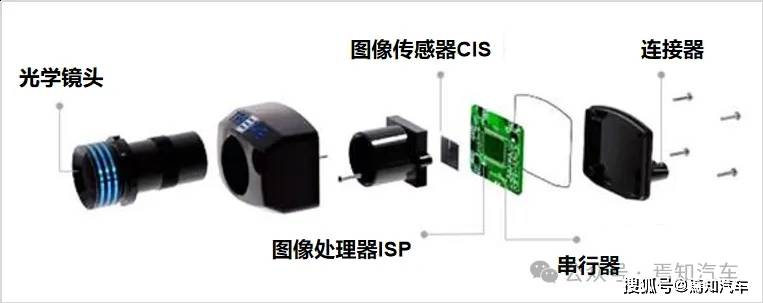
1)镜头:由光学镜片、滤光片、保护膜等组成。镜头负责聚焦光线,将视野中的物体投射到成像介质表面,进而生成光学图像。通常情况下来讲,摄像头70% 的光学参数由镜头决定。
镜头一般是由多片光学镜片组成,光学镜片的材质主要有塑胶(P)和玻璃(G)。车载镜头目前主要用玻塑混合镜头和玻璃镜头两大类型。其中环视、舱内摄像头多采用玻塑混合镜头,前视、侧视以及CMS摄像头多采用全玻璃镜头。
2)图像传感器CIS:即成像介质,利用光电转换元件将镜头投射到CIS表面上的光信号转换为电信号。 常见的图像传感器大致上可以分为 CCD 和 CMOS 两种。
总体而言,CCD传感器在灵敏度、图像质量等方面优于CMOS传感器。然而,CMOS传感器在功耗、体积、成本等方面优于CCD传感器。目前车载摄像头的图像传感器普遍采用CMOS芯片。
3)图像信号处理器 ISP:处理图像传感器CIS输出的RAW格式数据,主要处理功能包括图像缩放、自动曝光(AE)、自动白平衡(AWB)、自动对焦(AF)、图像去噪等,最终转换成RGB、YUV等格式数据。摄像头模组内部的ISP存在两种形式:A-内置在CMOS内部;B-独立的芯片构成。
4)串行器:将并行信号转换为串行信号。通常经过图像传感器CMOS或图像处理器ISP处理后输出的信号是基于MIPI /CSI标准,传输距离较短,因此就需要转换成适合长距离传输的串行信号,目前串行器常用的是美信的GMSL 2标准和TI的FPD-Link标准。
关于车载摄像头,较为重要的几个参数指标包括:视场角FOV、探测距离、分辨率、信噪比、帧率和动态范围等。
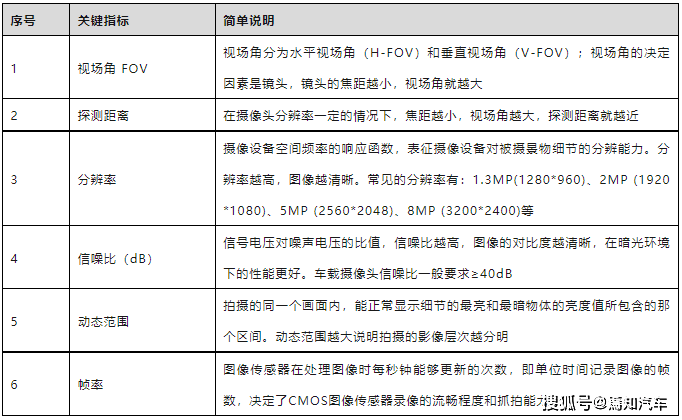
图表3. 车载摄像头关键参考指标(信息源自:《QCT/T 1128 汽车用摄像头》、公开资料整理)
相较于消费类摄像头,车载摄像头的工作环境极度恶劣,会经历振动、高温、雨雾、低温、光线变化剧烈等极端条件工况,因此车载摄像头的车规级要求也比较严苛。目前,车载摄像头的车规级测试的范围有图像性能、电气性能、防尘防水性能、机械性能、环境耐候性能、电磁兼容性能和耐久性等。
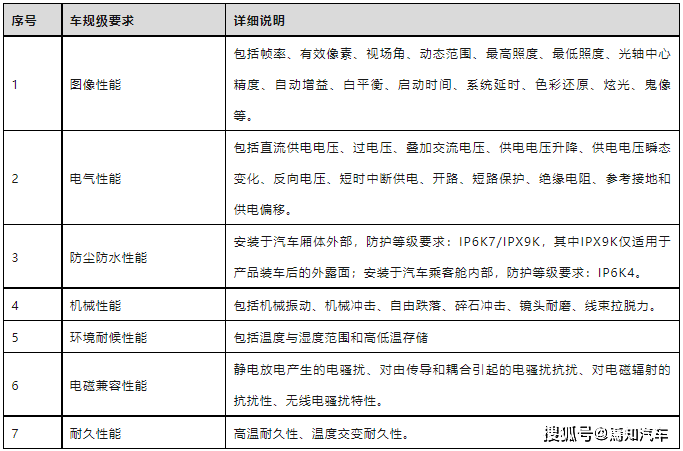
图表4. 车载摄像头车规级要求(信息源自:《QCT/T 1128 汽车用摄像头》、公开资料整理)
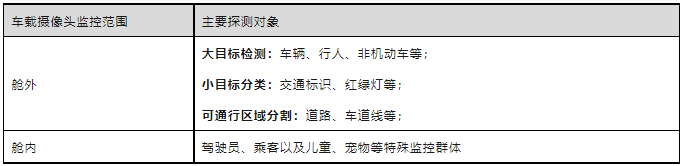
车载摄像头的应用场景可分两大类:舱外应用和舱内应用。舱外应用包括泊车辅助、行车辅助、CMS、DVR等应用;舱内应用包括DMS、OMS等应用。
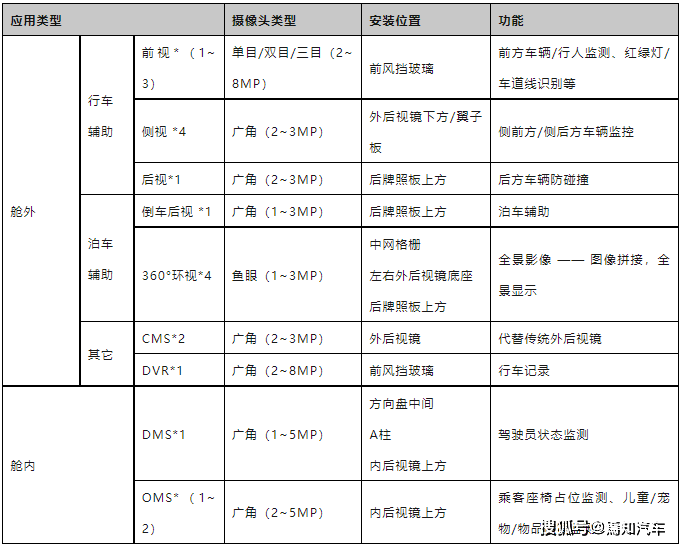
前视解决方案大致可分为两类:前视一体机和单纯的摄像头模组接入到独立的控制器。用于实现的功能通常包括:前向碰撞预警FCW、行人防碰撞预警PCW、车道线偏离预警LDW、车道线保持辅助LKA、自动紧急制动AEB、自适应巡航ACC等。
前视摄像头分辨率通常在2~8MP ,一般布置在前风挡位置。根据镜头个数的不同,前视摄像头又可分为:单目摄像头、双目摄像以及三目摄像头。
其中,单目摄像头主要使用在于中低端车型,多采用前视一体机形式。双目摄像头又可细分成两类:双目立体摄像头和两个单目摄像头(窄视角+宽视角)组合。三目摄像头基本没一体机的形态,一般是由三个不同视场角摄像头模组组合而成,数据要输入到智驾域控制器进行处理。

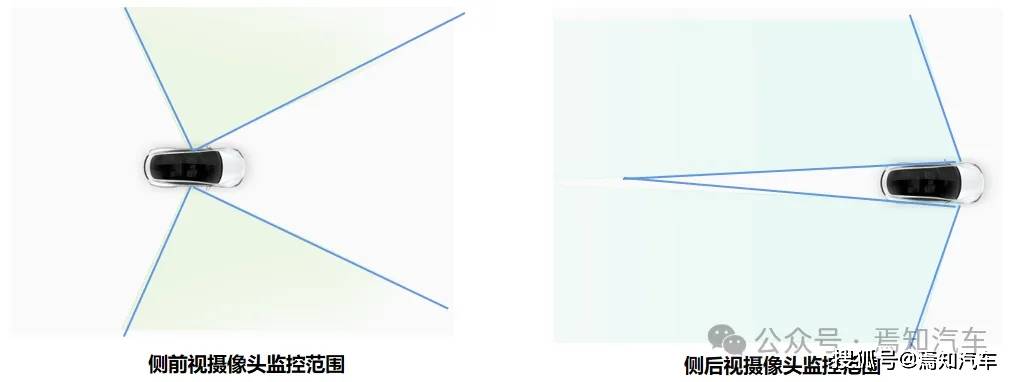
在高阶智能驾驶感知解决方案中,除了配置角毫米雷达外,一般还配置有侧视摄像头,作为异构冗余的感知传感器,大多数都用在在行车过程中侧前方和侧后方的目标物体监测。用于实现的功能包括盲点监测、横穿车辆碰撞预警等。
视场角为90°~100°,最远探测距离大于80m;通常安装在B柱或外后视镜,大多数都用在参与交通标志识别、监控侧前向邻近车道车辆、十字路口左右侧车辆/行人监测等。
视场角为90°~100°,最远探测距离大于100m;通常安装在车辆前翼子板,大多数都用在变道或汇入高速公路时侧后方相邻车道车辆的监控等。
区别于倒车后视摄像头或环视中的后部摄像头,该摄像头为行车辅助摄像头,它与侧视以及前视摄像头共同覆盖360°的中长距离的行车视觉感知范围。
行车后视摄像头:视场角为100°~120°,探测距离需求为50m~80m,用于弥补侧后视摄像头在车辆正后方的视觉感知探测盲区。
在泊车场景下,车载摄像头最开始是用于实现倒车影像功能,通过安装在车辆尾部的摄像头把车辆后方的场景显示到座舱内的中控显示屏上,辅助驾驶员安全泊车。
倒车摄像头(RVC)通常为广角摄像头,水平视场角(H-FOV)一般在120°~140°左右,垂直视场角(V-FOV)一般≥130°,分辨率一般在1MP~3MP。当前,倒车后视摄像头主要使用在在一些低端车型上,在未来将会被环视摄像头所取代。
现阶段,汽车上的视觉泊车辅助配置逐渐由倒车后视升级到360°全景环视,通过拼接算法对4颗环视摄像头输出的4个局部图像进行拼接,然后,拼接好的鸟瞰图会被传输到中控屏上进行显示。除了用于成像,环视摄像头也具备感知功能 —— 识别车身近距离范围车道线、探测近距离的目标物体,并将感知到的信息传输给控制器,实现车道线偏离预警、移动物体监测和预警等功能。
环视摄像头(SVC)一般会用鱼眼摄像头,水平视场角(V-FOV)≥170°,垂直视野(V-FOV)≥140°,分辨率一般在1MP~3MP。
行车记录仪摄像头记录汽车在行驶过程中的视频和图像。它不仅可用于娱乐——在行驶过程中拍摄风景,若发生交通事故,记录的视频信息还可当作执法的有效证据。
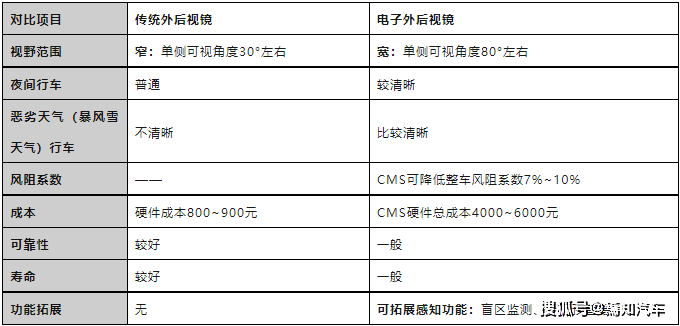
CMS(电子外后视镜)是一套基于摄像头和显示屏的组合装置来替代传统外后视镜。通过外部摄像头采集图像信息,经过数据处理后,将车辆侧后方的信息数据显示在座舱内的显示屏上。另外,摄像头还可兼顾侧后方的感知功能,比如盲区监测、障碍物提示等。
目前,车载摄像头在座舱内的应用主要有两种:驾驶员状态监测(DMS)和舱内乘员监测(OMS)。
基于视觉的DMS功能是利用布置在驾驶员前方的摄像头来监控驾驶员,通过识别并追踪眼部、眼球、面部以及头部等部位的特征信息,经过算法处理后判定驾驶员是不是真的存在分心、疲劳或危险驾驶行为,并能够及时提醒驾驶员。
DMS摄像头常见的安装布置位置:方向盘中间位置/内后视镜上方/A柱/集成于组合仪表显示屏等。DMS 摄像头通常用IR近红外摄像头(黑白摄像头),采用全局曝光模式,常用分辨率在1MP~5MP,水平视场角一般为40°~70°,帧率一般≥30fps。

基于视觉的OMS解决方案是通过摄像头来监控座舱内的所有乘员,主要支持实现的功能包括乘客佩戴安全带监测、车内活体检测(下车后,监控后排是否遗留有儿童、宠物等)等功能。
OMS摄像头常见的安装布置位置:内后视镜上方、中控显示屏上方等。OMS应用一般都会采用RGB-IR双模式摄像头,兼顾红外面部识别和彩色图像质量。另外,OMS摄像头也是采用全局曝光模式,常用分辨率为2MP~5MP,水平视场角一般≥120°。
内容节选自车载摄像头产业分析报告,剩余章节内容焉知后续将逐步推送,欢迎各位关注。
声明:本文由入驻搜狐公众平台的作者撰写,除搜狐官方账号外,观点仅代表作者本人,不代表搜狐立场。

